Systems Design State-of-the-art robotics solutions
Dexterous Manipulation
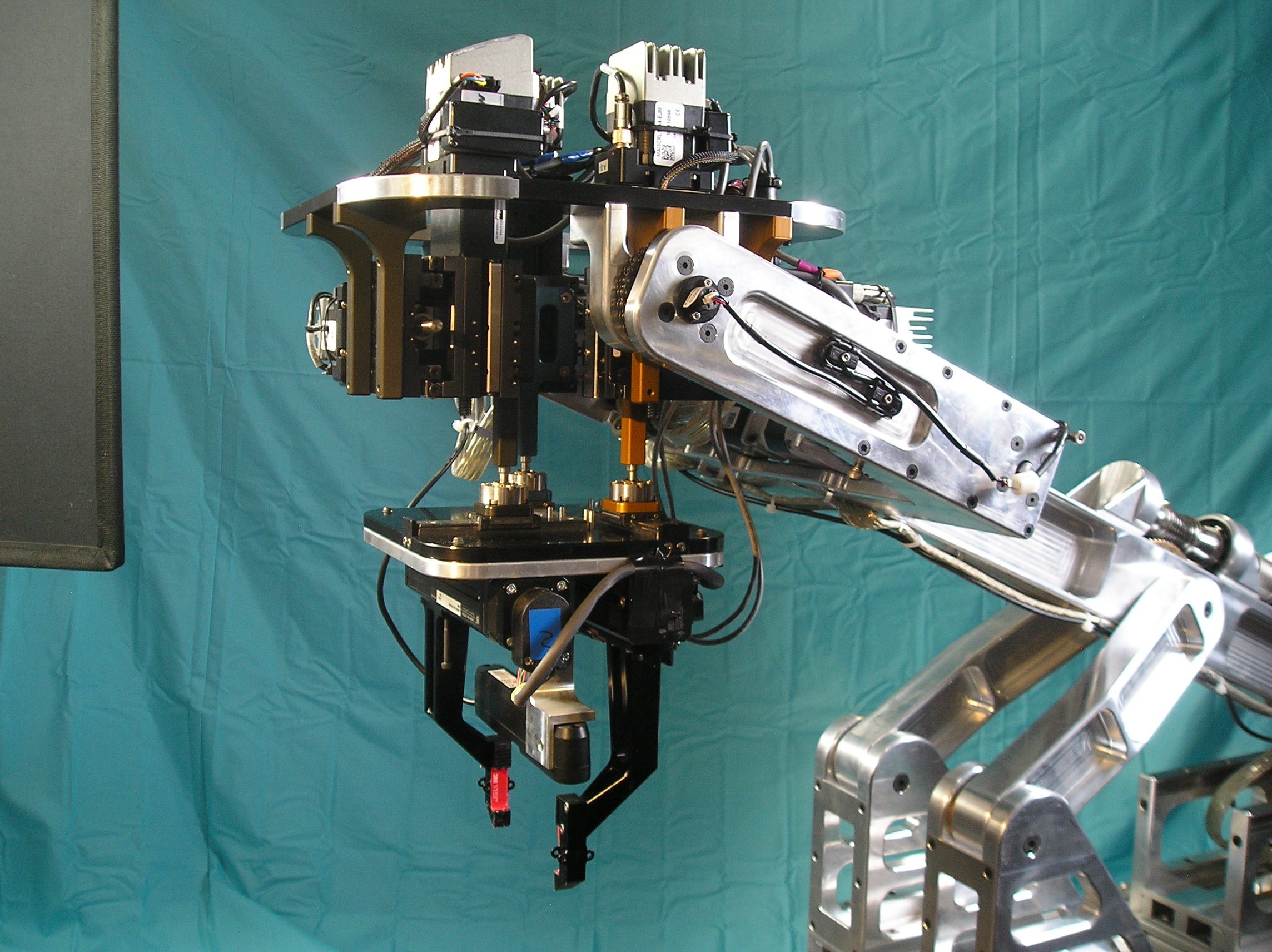
The Tri-Sphere concept has been adapted to serve as the basis for an innovative new type of dexterous manipulator. The manipulator was fitted with a standard two-jaw gripper, and a small digital camera and distance measuring interferometer were integrated into the gripper's palm. A sophisticated, LabView-based controls architecture provides the system's operator with almost unlimited operational flexibility and provides a high level of supervised autonomy.
The Tri-Sphere's rigid, prismatic geometry endows the manipulator with an exceptional strength-to-weight ratio. Unlike the hexapod, it is possible to create Tri-Sphere manipulators with strongly asymmetric work envelopes. Also, instead of its actuators being distributed along six pivoting struts, all of a Tri-Sphere's actuators are clustered together making it much easier to "ruggedize" the manipulator.
Be sure to save your work often. In the event that your connection to the Internet "times out," your work will NOT automatically be saved.
Privacy Policy - Terms of Service - Help -